



At the University of Sydney, new shapes are being developed / Work hidden from view will be carried out by robots
In the case of luxury automobiles, parts within reach of the driver are typically finished by hand. On the other hand, the body or chassis is usually assembled by robots on the assembly line. Seen through the eyes of the craftsman, an ode to robotics is in order: the robot carries out work hidden from view – so trained craftsmen have the time to demonstrate their skills and enjoy doing so.
We read this interesting contribution in a scientific report from the University of Sydney in Australia. At the school of architecture there PhD Simon Weir is researching Stereotomy. In his paper he describes improved joint construction and how it can be crafted by robots.
Background information: Stereotomy describes ancient building principles. One example are ancient bridges comprised of ashlar blocks and finalized by the keystone. Gravity and their mass hold them solidly in place – without mortar.
Arches like these can also be combined to vaults resulting in the construction of a cathedral.
But the devil is in the detail. The adjoining surfaces and angles must be worked with great precision otherwise spaces will ensue and prevent the transfer of forces.
A great deal of calculation precedes the construction and each block must be worked with ultimate precision. This portion of the work is hidden from view.
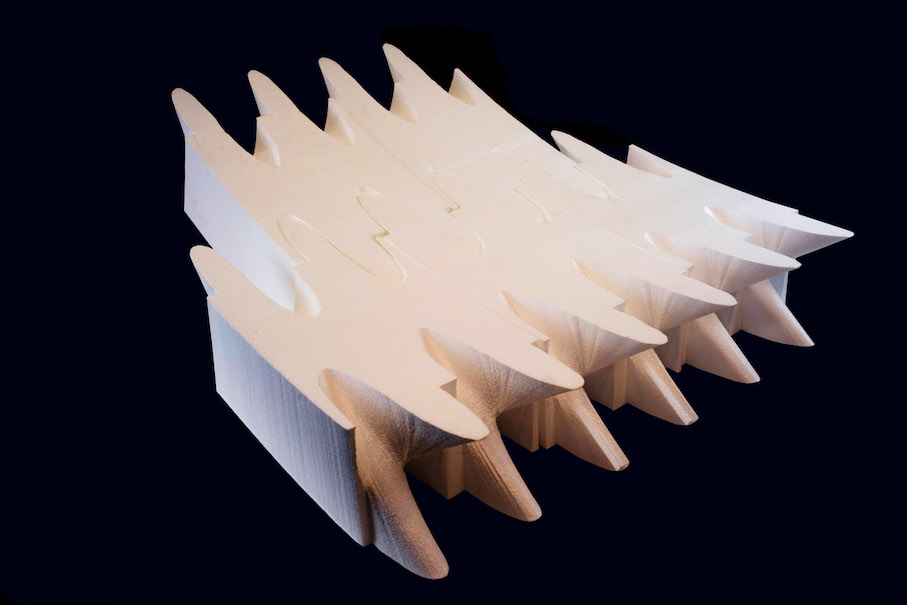
Simon Weir, while working with ruled surfaces, came up the idea of interlocking the blocks with fitted joints. The archetype was a patent on stone joints dating back to the 1970s.
The result was a series of peaks and valleys.
A CNC-Machine and a robotic arm are the ideal tools for the job at hand. First of all, it is near impossible to work stone to such a degree of precision by hand.

Secondly, if worked with the necessary precision, the seams are invisible upon completion – only along the outside can one see a wavy line adorning the joint.
The forces can be calculated exactly allowing the necessary gaging of width and height of the joint and block for any particular type of stone.
A 6-axial robotic arm and diamond saw wire were used for cutting the stone.
Other types of joints and options for assembly have already been considered by Weir and his team.


PhD researcher Shayani Fernando tested various types of stone. Her thesis entitled „The Machine and the Arch: A Stereotomic Exploration of Robotic Crafting for Dry Stone Interlocking Joint Structures“ explores the subject of robotic crafting of mortar-less structures in stone. Matt Gardner produced a prototype of the wall.
Dr Simon Weir, University of Sydney
Photos: Simon Weir

See also:

(12.11.2018, USA: 11.12.2018)